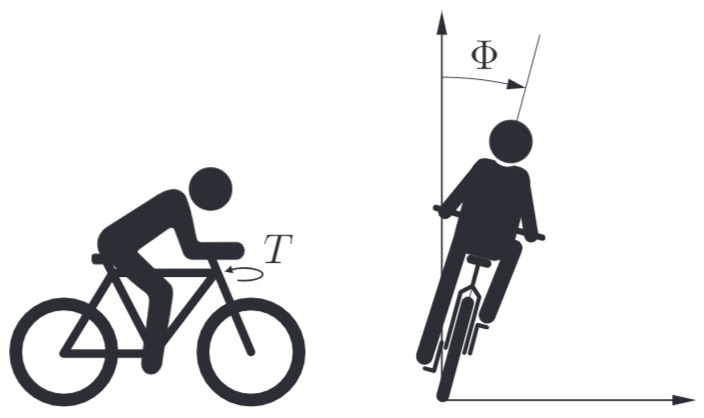
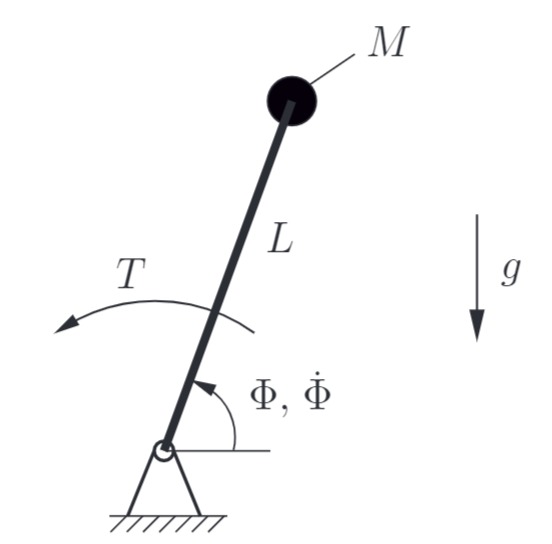
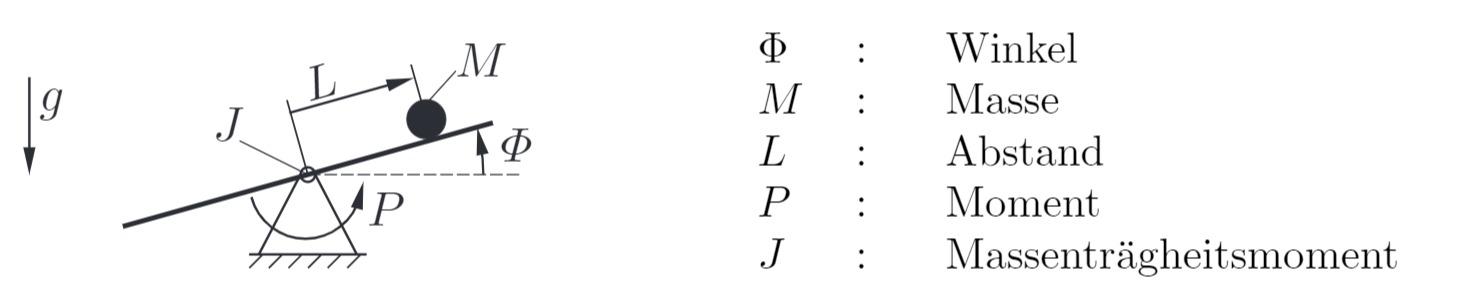
Betrachtet wird ein inverses Pendel mit geschwindigkeitsabhängiger Lagerreibung gemäß folgender Abbildung:
Winkel
Winkelgeschwindigkeit
Motormoment
Pendellänge
Punktmasse am Ende des Pendels
Erdbeschleunigung
Das System kann durch folgende nichtlineare Differentialgleichung im Bereich beschrieben werden:
Der Winkel soll mit Hilfe des Motormoments in der oberen Ruhelage eingeregelt werden. und sind konstant.
Hinweis: Die Aufgabenteile a), b) und c)-d) können unabhängig voneinander gelöst werden.
a) Geben Sie eine linearisierte Zustandsraumdarstellung der Regelstrecke in der Form
mit für kleine Abweichungen um den Arbeitspunkt an.
Für eine bestimmte Parametrierung ergeben sich die folgenden Zustandsraummatrizen, die im Folgenden verwendet werden sollen:
b) Ist dieses System steuerbar?
Es soll ein Zustandsregler mit der Rückführung ausgelegt werden.
c) Geben Sie die neue Systemmatrix für den geschlossenen Regelkreis in Abhängigkeit von und an.
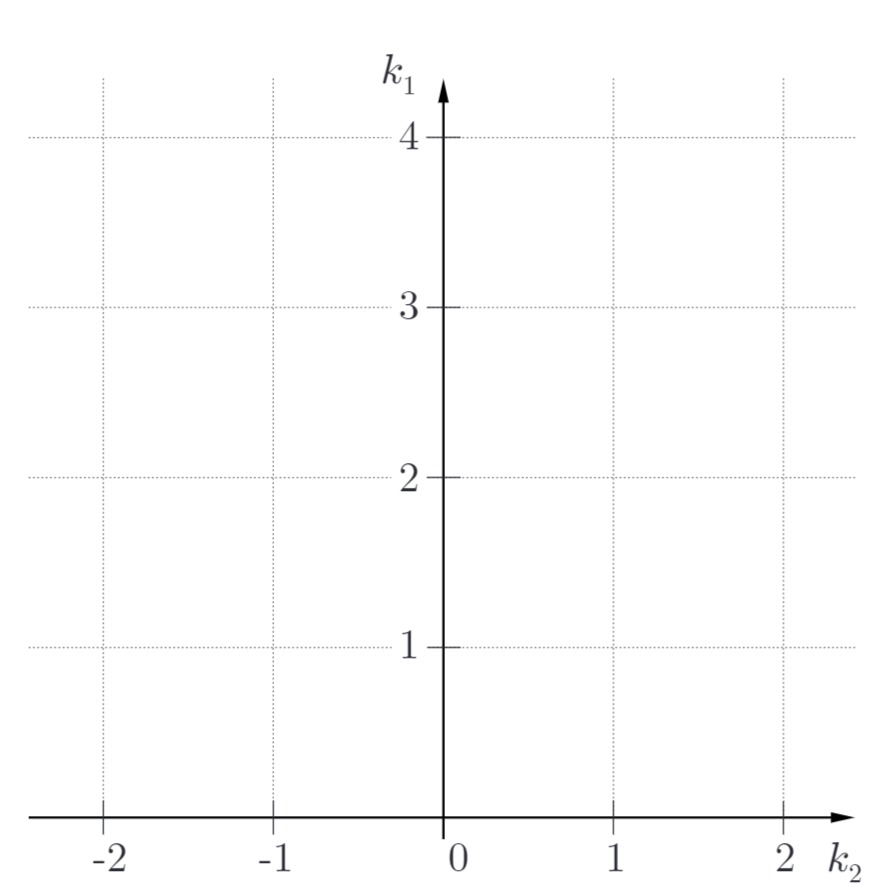
d) Bestimmen Sie die Stabilitätsbedingungen für und , sodass der geschlossene Regelkreis BIBO-stabil ist. Zeichnen Sie die Stabilitätsgrenzen in das folgende Diagramm ein und schraffieren Sie die stabilen Bereiche.

 Thema vorschlagen
Thema vorschlagen Theorie erstellen
Theorie erstellen Aufgabe erstellen
Aufgabe erstellen