Aufgabenstellung:
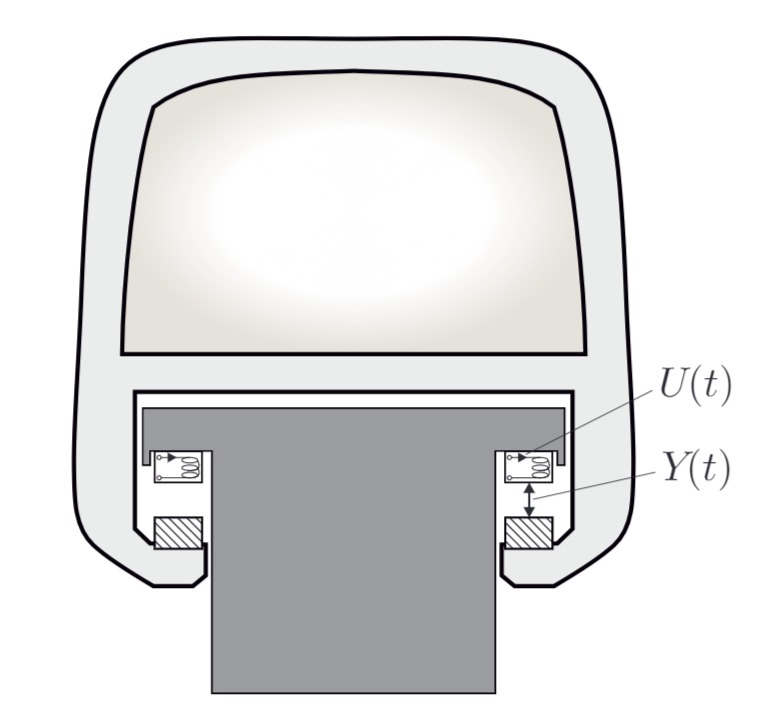
Eine Magnetschwebebahn soll elektrodynamisch zum Schweben gebracht werden, was eine aktive Abstandsregelung erfordert.
Das betrachtete System wird durch folgende nichtlineare Differentialgleichung beschrieben:
mit
a) Definieren Sie geeignete Zustandsgrößen und bestimmen Sie eine äquivalente Beschreibung des Systems durch einen Satz von Differentialgleichungen 1. Ordnung.
b) Bestimmen Sie
c) Linearisieren Sie das System um den Arbeitspunkt
Hinweis: Die folgenden Aufgabenteile sind unabhängig von den vorherigen lösbar.
Im Folgenden soll nur noch das linearisierte Streckenmodell verwendet werden, für das mit einer bestimmten Parametrierung gilt:
d) Ist das System stabil? Ist es steuerbar?
Für das System soll nun ein Zustandsregler mit
e) Berechnen Sie die Rückführmatrix
Lösungsweg:
a) Zustandsgrößen und Differentialgleichungen 1.Ordnung
Die gegebene Differentialgleichung beschreibt ein System zweiter Ordnung. Ein geeigneter Zustandsvektor lautet:
Anhand des eingeführten Zustandsvektors kann die Prozessbeschreibung in ein System von (nichtlinearen) Differentialgleichungen erster Ordnung überführt werden
mit
b)
Für Ruhelagen
Somit ergeben sich zwei Bedingungen
Mit
c) Linearisieren um den Arbeitspunkt
Durch die Linearisierung des Systems um die Ruhelage verschwindet der erste Term
Ausgewertet am Linearisierungspunkt berechnen sich die Jacobi-Matrizen zu:
d) Stabilität und Steuerbarkeit
Berechnung des charakteristischen Polynoms:
Da im charakteristischen Polynom der Koeffizient des Terms erster Ordnung fehlt, folgt nach dem Hurwitz-Kriterium die Instabilität des ungeregelten Systems.
Berechnung der Steuerbarkeitsmatrix
Es gilt
e) Rückführmatrix
Für den durch Zustandsrückführung geschlossenen Regelkreis sind entsprechend der Systemordnung zwei Pole vorzugeben. Wegen der Forderung
Das Wunschpolynom lautet somit
Sei
Das charakteristische Polynom des geschlossenen Regelkreises berechnet sich somit zu
Koeffizientenvergleich zwischen Wunschpolynom und charakteristischem Polynom des Regelkreises liefert
Es ergibt sich die Verstärkung
Lösung:
- instabil und steuerbar