Aufgabenstellung:
Betrachtet wird das folgende Modell der Fahrradneigung (
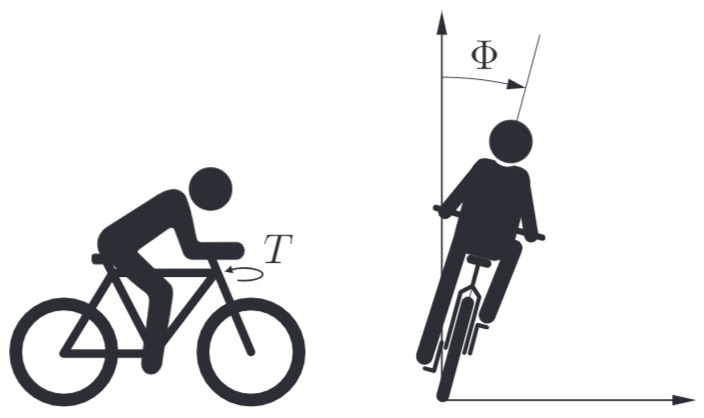
Die Dynamik des Fahrrads kann vereinfacht mit der folgenden Gleichung beschrieben werden (
a) Geben Sie eine linearisierte Zustandsraumdarstellung in der Form
mit
an. Wählen Sie den Winkel
Für eine bestimmte Parametrierung ergeben sich die folgenden Zustandsraummatrizen, die im Folgenden verwendet werden sollen:
b) Weisen Sie nach, dass das lineare Zustandsraummodell stabil ist.
Das System soll nun mit einem Zustandsregler
c) Bestimmen Sie die Konstanten
Hinweis: Alle Aufgabenteile sind unabhängig voneinander lösbar.
Lösungsweg:
a) Linearisierte Zustandsraumdarstellung
Zunächst wird die nichtlineare Gleichung linearisiert und der gegebene Arbeitspunkt eingesetzt:
Mit
b) Stabilitä nachweisen
Charakteristisches Polynom aufstellen:
Alle Koeffizienten sind vorhanden und größer als
c) Konstanten
Der Skalar der Eingangsgrößsen
Bestimmung des charakteristischen Polynoms von
Das Sollpolynom eines schwingungsfähigen
Mithilfe eines Koeffizientenvergleichs können die Parameter nun bestimmt werden:
Lösung:
- stabil
;