Aufgabenstellung:
Eine Kugel mit der Masse
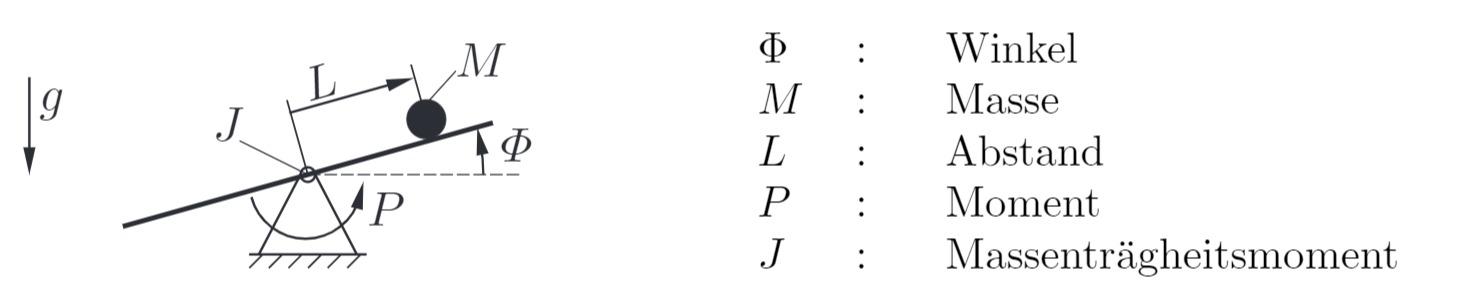
Das System wird durch folgende nichtlineare Differenzialgleichungen (mit
- Bestimmen Sie für die Gleichungen 1) und 2) jeweils eine linearisierte Form in einem Arbeitspunkt
mit . - Geben Sie für das in
linearisierte System eine Zustandsraumdarstellung in folgender Form an: mit - Ist das in
linearisierte System steuerbar? Begründen Sie Ihre Aussage.
Lösungsweg:
Drücke auf "Aufdecken" um dir den ersten Schritt der Lösung anzuzeigen
a) linearisierte Form im Arbeitspunkt
Linearisierung Gleichung (1) :
AP einsetzen:
Linearisierung Gleichung (2):
AP einsetzen:
b) Zustandsraumdarstellung
c) Steuerbarkeit
Das System ist steuerbar, wenn
Lösung:
- Gleichung (1):
Gleichung (2): -
- System steuerbar.