Aufgabenstellung:
Gegeben ist das folgende System in Blockschaltbild-Form
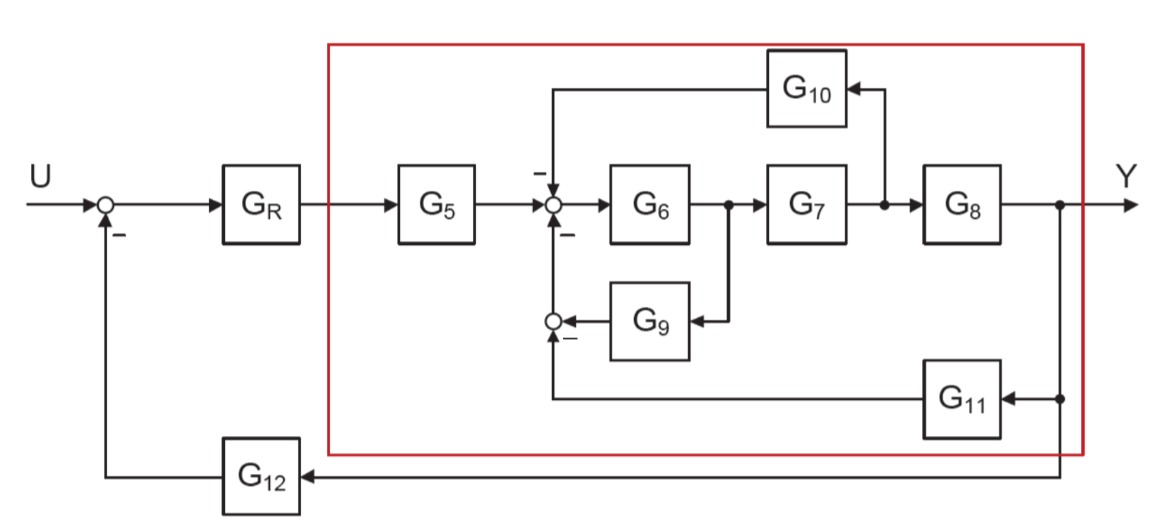
mit den allgemeinen Übertragungsfunktionen
a) Fassen Sie das in dem roten Kasten dargestellte Übertragungssystem zu einer doppelbruchfreien Übertragungsfunktion
b) Prüfen Sie mit ob die Übertragungsfunktion
Das System
c) Stellen Sie die Gesamtübertragungsfunktion
d) Ist das System mit einem P-Regler
e) Das System
f) Der Regler
Lösungsweg:
a) Doppelbruchfreie Übertragungsfunktion
Zunächst wird der relevante Teil des Blockschaltbildes (in der Abbildung rot markiert) umgestellt:
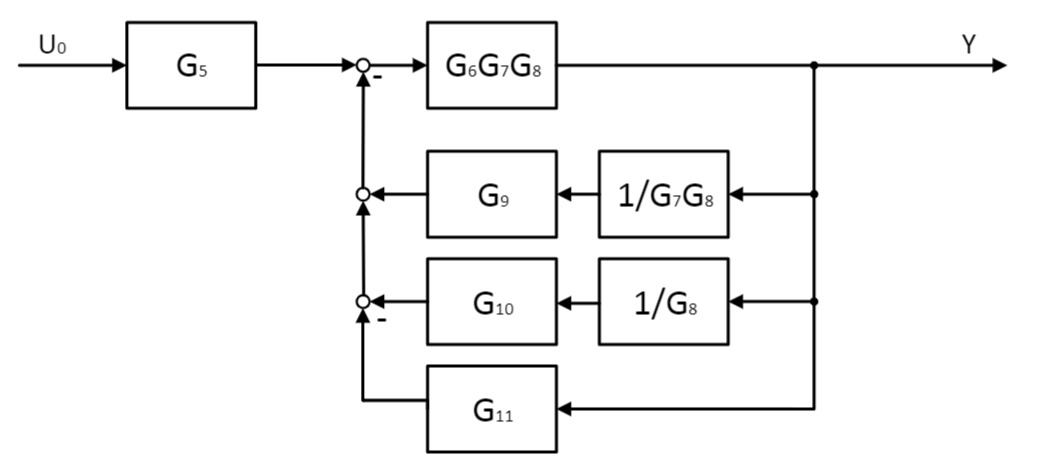
Nun lässt sich das System mit den Regeln zusammenfassen. Die Übertragungsfunktion
Somit lässt sich die gesuchte Übertragungsfunktion sehr einfach aufstellen
b) Stabilität der Übertragungsfunktion
Durch Einsetzen der gegebenen Übertragungsfunktionen für
Bei Betrachtung der Koeffizienten des Nennerpolynoms wird sofort klar, dass die notwendige Bedingung eines Hurwitz-Polynoms nicht erfüllt ist, da nicht alle Koeffizienten das gleiche Vorzeichen haben (
c) Gesamtübertragungsfunktion
Für die gesamte Übertragungsfunktion
In diesem Fall ergibt sich für
Eingesetzt in (1) ergibt für den Nenner
Damit ergibt sich die gesuchte Übertragungsfunktion zu
d) Stabilität mit einem P-Regler
Damit ein System stabilisierbar ist, muss durch den Regler und die Rückkopplung das Nennerpolynom der Gesamtübertragungsfunktion
Es gilt laut Aufgabenstellung
Damit (2) ein Hurwitz-Polynom ist, müssen als notwendige Bedingung alle Koeffizienten
für
Des Weiteren gilt es die hinreichende Bedingung, dass die Hurwitzdeterminante
Die beiden Hurwitz-Determinanten
Der geschlossene Regelkreis ist demnach für ein
gilt, sowie für
e) Bestimmung von
Für die Aufgabe gilt
Die Sprungantwort des Systems berechnet sich zu
Damit folgt
Zwar gilt der Endwertsatz nur für stabile Systeme, jedoch kann bei der Existenz eines stationären Endwertes von der Stabiliät des Systems ausgegangen werden. Das Ergebniss kann allerdings trotzdem auf Plausibilität geprüft werden. Dies kann durch Einsetzen des erhaltenen Wertes für
Der für
f) Regler
- empirische Einstellregeln, basierend auf einem Schwingversuch
- Regelkreis wird mit einem P-Regler geschlossen und die Regelverstärkung so lange erhöht, bis die Stabilitätsgrenze erreicht ist
- Dafür notwendige Regelverstärkung wird mit
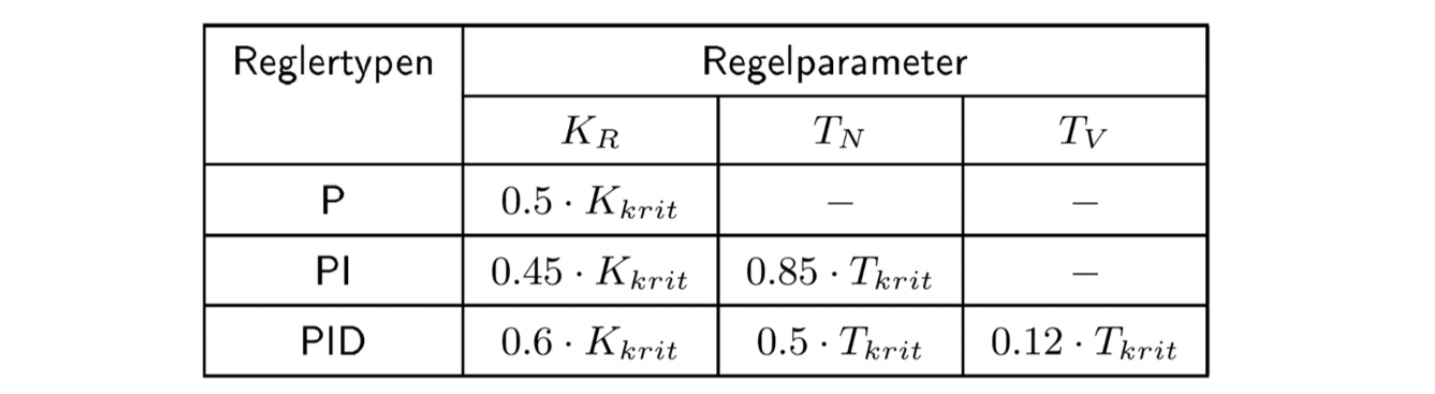
bezeichnet, die Periodendauer der an der Stabilitätsgrenze auftretenden Dauerschwingung mit wird bezeichnet - Mit Hilfe dieser beiden Kennwerte lassen sich dann die Reglerparameter nach der in der Abbildung dargestellten Tabelle bestimmen
Der Stabilitätsrand wurde in Aufgabe d) bereits rechnerisch ermittelt.
P-Regler
Für den P-Regler ergibt sich nach der oben dargestellten Tabelle für dessen die Übertragungsfunktion
PI-Regler
Für den PI-Regler mit der Übertragungsfunktion
muss Reglerverstärkung
Aus der Tabelle ergibt sich
Die Übertragungsfunktion des PI-Reglers ergibt sich also zu
PID-Regler
Schlussendlich ergibt sich für den PID-Regler mit der Übertragungsfunktion
und dem zusätzlichen Parameter
Die Übertragungsfunktion ergibt sich damit zu
Lösung:
-
- instabil
-
- Siehe Musterlösung