Aufgabenstellung:
Der Antriebsstrang eines elektrischen Fahrzeugs soll modelliert werden. Die vereinfachte Struktur des Antriebsstrangs ist nachfolgend dargestellt.

Hierbei bezeichnet
Mit
Das Getriebe übersetzt das vom Motor erzeugte Drehmoment mit dem Verhältnis
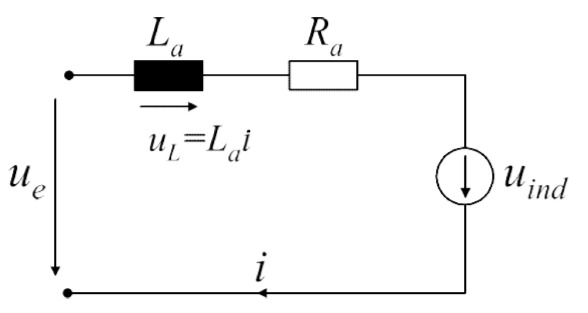
- Bestimmen Sie mit Hilfe des Ersatzschaltbildes eine Differentialgleichung, die die Dynamik des Elektromotors beschreibt und stellen Sie diese Differentialgleichung in Form eines Blockschaltbildes dar. Behandeln Sie die Winkelgeschwindigkeit
zunächst als zusätzliche unabhängige Eingangsgröße. - Bestimmen Sie eine Differentialgleichung die das dynamische Verhalten des Getriebes und der Fahrzeugdynamik beschreibt und stellen Sie diese ebenfalls als Blockschaltbild dar.
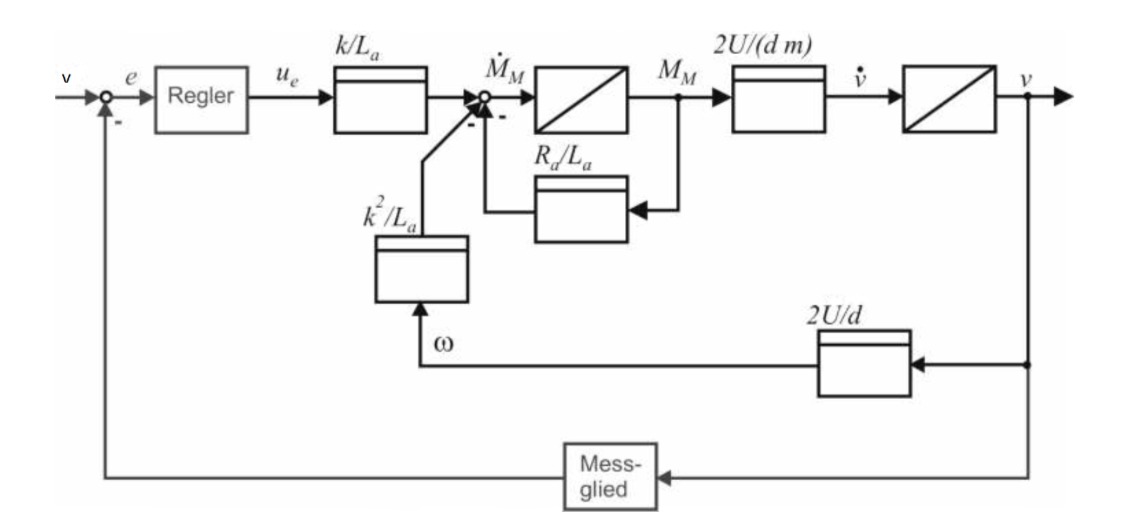
- Stellen Sie das gesamte modellierte System in einem Blockschaltbild dar und ergänzen Sie die für das Motormodel benötigte Rückführung der Winkelgeschwindigkeit
aus der Fahrzeugdynamik. - Fügen Sie das modellierte System in einen geschlossenen Standardregelkreis ein. Dabei stellt die Eingangsspannung
die Stellgröße und die Fahrzeug-Geschwindigkeit die Regelgröße dar. Der Regler und die Messeinrichung können als allgemeine Blöcke eingetragen werden.
Lösungsweg:
a) Gesucht ist die Differentialgleichung für
Als Eingang fungiert die anliegende Eingangsspannung
Weiterhin gilt für die elektrischen Bauteile (Induktivität und ohmscher Widerstand)
- Induktivität:
- Ohmscher Widerstand:
Somit folgt
beziehungsweise
Aus der Aufgabenstellung folgt, dass
Blockschaltbild:

b) Differentialgleichung die das dynamische Verhalten des Getriebes und der Fahrzeugdynamik beschreibt und Blockschaltbild
Im nächsten Schritt wird das Getriebe und die Fahrdynamik modeliert. Mit den Angaben der Aufgabenstellung ergibt sich
Getriebe:
Kraftübertragung Straße:
Dynamik Fahrzeugmasse:
Durch Einsetzen von (1) in (2) und dem Einsetzen des Ergebnisses in (3) ergibt sich die DGL
Blockschaltbild:

c) Gesamte System in Blockschaltbild
Zunächst muss die Winkelgeschwindigkeit
Mit Hilfe der Getriebeübersetzung
Damit ergibt sich das Blockschaltbild des vollständigen Systems zu:

d) Geschlossener Regelkreis (Blockschaltbild):
Lösung:
- siehe Musterlösung
- siehe Musterlösung